Four-legged robot used in trial to monitor radiation
 JET
JETSellafield nuclear power plant is testing whether a robot can be used to monitor radiation levels.
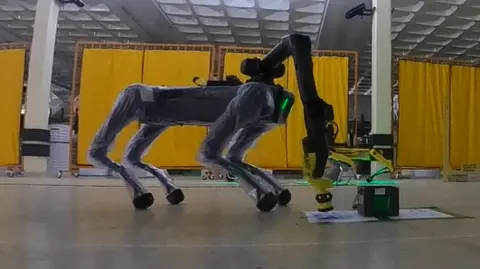
The Cumbrian plant has completed its first trial of a swabbing tool, designed to be used by Spot, a four-legged robot, to swab surfaces in areas containing radioactive material.
It is hoped the technology will effectively monitor the site, removing the need for people to enter hazardous environments.
Deon Bulman, who is in charge of the plant's remotely operated vehicle equipment, said the robot's agility and responsiveness allowed it to operate in areas considered dangerous, and "those capabilities support faster, safer, and more cost-effective decommissioning operations".
Bulman said the 'haptic feedback' provided by the robot during swabbing allowed for greater control and precision "pushing forward the adoption of advanced robotics in the nuclear sector".
 Sellafield
SellafieldSellafield's health physics team carries out hundreds of swabs on surfaces daily, amassing data in order to determine decommissioning strategies and maintain safety standards.
In the trial, a swabbing tool designed by the Robotics & AI Collaboration (RAICo) was attached to Boston Dynamics' Spot robot to perform the routine task instead.
The team has also developed software that gives commands to Spot so the robot successfully mimics a hand's swabbing motion.
 Sellafield
SellafieldDuring the trial, the robot was sent into a restricted area to inspect a simulated radiological spill and take a swab of a mock-contaminated surface.
RAICo director, Dr Kirsty Hewitson, said the trial followed a similar successful test at the Joint European Torus facility in Culham in Oxfordshire last year, experimenting with fusion technology.
She said the tests showed robotics "could have an impact on both nuclear decommissioning and fusion engineering sites".